Stroj na řezání a řezání kovůje zařízení, které se používá k podélnému řezání širokých kovových svitků na řadu úzkých pásů a jeho řídicí systém hraje zásadní roli při zajišťování efektivního a přesného provádění řezací práce.
Řezací stroj na řezání kovů nůžkami je druh zařízení používaného k podélnému řezání širokého kovového svitku na řadu úzkých pásů a jeho řídicí systém hraje zásadní roli při zajišťování toho, aby se řezání provádělo efektivně a přesně. Následuje podrobný popis řídicího systému pro stroje na řezání kovů:

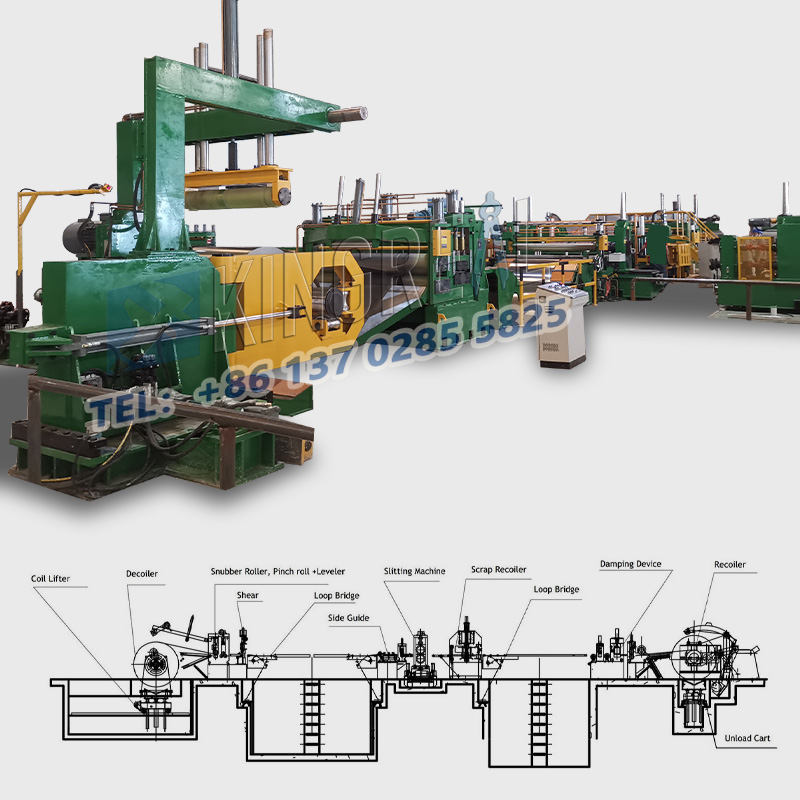
Řídicí systém stroje na řezání a řezání kovů zahrnuje zejména tyto části:
l Hlavní řídicí systém: obvykle se skládá z PLC (Programmable Logic Controller) nebo DCS (Distributed Control System), který slouží k integrovanému řízení a koordinaci celého systému.
l Pohonný systém: včetně servomotoru a frekvenčního měniče, který se používá k pohonu hlavní osy nože a osy navíjení, aby byla zajištěna stabilita tahu a rychlosti kovového pásu.
l Detekční systém: včetně snímačů napětí, snímačů rychlosti, snímačů polohy atd., které se používají pro monitorování v reálném čase a stav provozu systému zpětné vazby.
l Rozhraní člověk-stroj (HMI): používá se pro interakci operátor-stroj, nastavení parametrů řezání a monitorování stavu zařízení.
l Pomocný systém: včetně mazacího systému, chladicího systému atd., Pro zajištění stability a účinnosti zařízení při práci.
Návrh řídicího systému pro stroj na řezání a řezání kovů je založen na následujících klíčových principech:
Princip řízení s uzavřenou smyčkou:
Použití snímačů napětí, snímačů rychlosti a dalších detekčních prvků pro sledování stavu pásu v reálném čase a nastavení systému pohonu prostřednictvím signálu zpětné vazby pro realizaci řízení napětí a rychlosti pásu v uzavřené smyčce.
1. Princip řízení pohybu:
Přijetí servomotorů a přesných kuličkových šroubů a dalších vysoce přesných prvků řízení pohybu pro zajištění synchronizovaného provozu a přesného umístění osy řezacího nože a osy navíjení.
2. Modulární design:
Každá část řídicího systému má modulární design, který je vhodný pro údržbu a modernizaci. Například hlavní řídicí systém, pohonný systém, detekční systém atd. jsou nezávislé a vzájemně koordinované.
3. Princip ergonomie:
Rozhraní člověk-stroj je navrženo tak, aby bylo jednoduché a intuitivní, takže operátor může snadno nastavovat parametry, spouštět a sledovat provoz zařízení a omezovat chyby.
4. Redundantní design:
Redundantní design je přijat v klíčových částech, jako je duální napájecí zdroj, záložní servomotor atd., aby se zlepšila spolehlivost a dostupnost systému.
Pro více informací o stroji na řezání svitkůvítejte, kontaktujte nás!